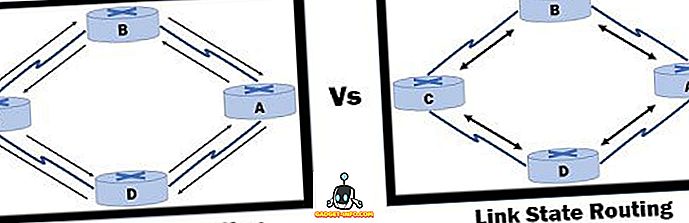
ความแตกต่างก่อนหน้าระหว่าง Distance vector และการกำหนดเส้นทางสถานะการเชื่อมโยงคือในการกำหนดเส้นทางระยะทางเวกเตอร์เราเตอร์แบ่งปันความรู้ของระบบปกครองตนเองทั้งหมดในขณะที่การกำหนดเส้นทางเชื่อมโยงสถานะเราเตอร์แบ่งปันความรู้เฉพาะเราเตอร์เพื่อนบ้านในระบบปกครองตนเอง
แผนภูมิเปรียบเทียบ
| พื้นฐานสำหรับการเปรียบเทียบ | การกำหนดเส้นทางเวกเตอร์ระยะทาง | การกำหนดเส้นทางลิงก์ |
|---|---|---|
| ขั้นตอนวิธี | เบลล์แมนฟอร์ด | Dijsktra |
| มุมมองเครือข่าย | ข้อมูลโทโพโลยีจากมุมมองเพื่อนบ้าน | ข้อมูลที่สมบูรณ์เกี่ยวกับทอพอโลยีเครือข่าย |
| การคำนวณเส้นทางที่ดีที่สุด | ขึ้นอยู่กับจำนวนการกระโดดน้อยที่สุด | ขึ้นอยู่กับต้นทุน |
| อัพเดท | ตารางเส้นทางเต็ม | อัพเดตสถานะลิงก์ |
| อัพเดตความถี่ | การปรับปรุงเป็นระยะ | ทริกเกอร์อัพเดต |
| ซีพียูและหน่วยความจำ | อัตราการใช้ต่ำ | เข้ม |
| ความง่าย | ความเรียบง่ายสูง | ต้องใช้ผู้ดูแลระบบเครือข่ายที่ผ่านการฝึกอบรม |
| เวลาบรรจบ | ปานกลาง | รวดเร็ว |
| อัพเดท | เมื่อออกอากาศ | บนมัลติคาสต์ |
| โครงสร้างลำดับชั้น | ไม่ | ใช่ |
| โหนดระดับกลาง | ไม่ | ใช่ |
ความหมายของการจัดเส้นทางระยะทางเวกเตอร์
ใน การกำหนดเส้นทางระยะทางเวก เตอร์เราเตอร์ไม่จำเป็นต้องรู้เส้นทางทั้งหมดไปยังทุกส่วนของเครือข่าย เพียงต้องการทราบทิศทางหรือเวกเตอร์ที่จะส่งแพ็คเก็ต เทคนิคนี้กำหนดทิศทาง (เวกเตอร์) และระยะทาง (hop count) ไปยังเครือข่ายใด ๆ ในเครือข่าย
อัลกอริทึมการจัดเส้นทางเวกเตอร์ระยะทางส่งตารางเส้นทางของพวกเขาทั้งหมดหรือบางส่วนไปยังเพื่อนบ้านที่อยู่ติดกันเป็นระยะ ๆ เราเตอร์ที่ใช้โปรโตคอลการกำหนดเส้นทางระยะทางเวกเตอร์จะส่งการอัปเดตเป็นระยะโดยอัตโนมัติแม้ว่าจะไม่มีการเปลี่ยนแปลงในเครือข่าย
เราเตอร์สามารถตรวจสอบเส้นทางที่รู้จักทั้งหมดและปรับเปลี่ยนตารางเส้นทางในท้องถิ่นของตนตามข้อมูลที่ปรับปรุงที่ได้รับจากการกำหนดเส้นทางใกล้เคียง กระบวนการนี้เรียกว่า "การเราต์ด้วยข่าวลือ" เนื่องจากข้อมูลการเราต์ที่เราเตอร์มีอยู่ในทอพอโลยีเครือข่ายนั้นขึ้นอยู่กับมุมมองของตารางเส้นทางของเราเตอร์เพื่อนบ้าน
RIP และ IGRP เป็นโปรโตคอลเวกเตอร์ระยะทางที่ใช้กันทั่วไปซึ่งใช้การนับ hop หรือตัวชี้วัดการกำหนดเส้นทาง
คำจำกัดความของการกำหนดเส้นทางลิงก์สถานะ
ในการเรา ต์สถานะลิงก์ เราเตอร์แต่ละตัวพยายามสร้างแผนผังภายในของโทโพโลยีเครือข่ายของตนเอง ในช่วงเริ่มต้นของการเริ่มต้นเมื่อเราเตอร์เปิดใช้งานมันจะส่งข้อความไปยังเครือข่ายและรวบรวมข้อมูลจากเราเตอร์ที่เชื่อมต่อโดยตรง นอกจากนี้ยังให้ข้อมูลเกี่ยวกับว่าลิงค์ที่จะไปถึงเราเตอร์นั้นทำงานอยู่หรือไม่ ข้อมูลนี้ถูกใช้โดยเราเตอร์อื่นเพื่อสร้างแผนที่ของโครงสร้างเครือข่าย จากนั้นเราเตอร์จะใช้แผนที่เพื่อเลือกเส้นทางที่ดีที่สุด
โปรโตคอลกำหนดเส้นทางการเชื่อมโยงสถานะตอบสนองอย่างรวดเร็วต่อการเปลี่ยนแปลงของเครือข่าย มันจะส่งการอัพเดตทริกเกอร์เมื่อมีการเปลี่ยนแปลงเครือข่ายเกิดขึ้นและส่งการปรับปรุงเป็นระยะในช่วงเวลานานเช่น 30 นาที หากลิงก์เปลี่ยนแปลงสถานะอุปกรณ์ตรวจพบการเปลี่ยนแปลงที่สร้างและเผยแพร่ข้อความอัพเดตเกี่ยวกับลิงก์นั้นไปยังเราเตอร์ทั้งหมด จากนั้นเราเตอร์แต่ละตัวจะคัดลอกข้อความอัพเดตและอัพเดตตารางเส้นทางและส่งต่อข้อความไปยังเราเตอร์ใกล้เคียงทั้งหมด
จำเป็นต้องมีข้อความของการอัพเดทนี้เพื่อให้แน่ใจว่าเราเตอร์ทั้งหมดจะทำการอัพเดทฐานข้อมูลก่อนที่จะสร้างตารางเส้นทางการอัพเดทที่สะท้อนถึงเทคโนโลยีใหม่ โปรโตคอล OSPF คือการกำหนดเส้นทางลิงก์ตัวอย่าง
ความแตกต่างที่สำคัญระหว่างการกำหนดเส้นทางเวกเตอร์ระยะทางและการกำหนดเส้นทางเชื่อมโยงสถานะ
- อัลกอรึทึมของเบลแมน - ฟอร์ดใช้สำหรับการกำหนดเส้นทางเวกเตอร์ระยะทางในขณะที่ดิจิสตราใช้สำหรับการกำหนดเส้นทางการเชื่อมโยงสถานะ
- ในการกำหนดเส้นทางระยะทางเราเตอร์จะได้รับข้อมูลทอพอโลยีจากมุมมองเพื่อนบ้าน ในทางตรงกันข้ามในการกำหนดเส้นทางลิงค์เราเตอร์จะได้รับข้อมูลที่สมบูรณ์เกี่ยวกับโครงสร้างเครือข่าย
- การกำหนดเส้นทางระยะทางเวกเตอร์คำนวณเส้นทางที่ดีที่สุดตามระยะทาง (จำนวนกระโดดน้อยที่สุด) เมื่อเทียบกับการกำหนดเส้นทางลิงก์จะคำนวณเส้นทางที่ดีที่สุดโดยพิจารณาจากต้นทุนที่น้อยที่สุด
- การกำหนดเส้นทางการเชื่อมโยงสถานะจะอัปเดตสถานะลิงก์ในขณะที่การจัดเส้นทางระยะทางเวกเตอร์อัปเดตตารางเส้นทางทั้งหมด
- ความถี่ของการอัปเดตในเทคนิคการกำหนดเส้นทางทั้งสองนั้นเป็นการอัพเดทเวกเตอร์ระยะทางที่แตกต่างกันเป็นระยะในขณะที่ความถี่การอัพเดทสถานะลิงก์ใช้การอัพเดทที่ถูกกระตุ้น
- การใช้ประโยชน์ CPU และหน่วยความจำในการกำหนดเส้นทางเวกเตอร์ระยะทางต่ำกว่าการกำหนดเส้นทางสถานะลิงก์
- การกำหนดเส้นทางระยะทางเวกเตอร์นั้นง่ายต่อการติดตั้งและจัดการ ในทางตรงกันข้ามการกำหนดเส้นทางของลิงก์มีความซับซ้อนและต้องการผู้ดูแลระบบเครือข่ายที่ผ่านการฝึกอบรม
- เวลาของการลู่เข้าในการกำหนดเส้นทางเวกเตอร์ระยะทางช้าและมักจะมีปัญหาจากการนับถึงปัญหาไม่สิ้นสุด ในทางกลับกันเวลาของการบรรจบกันในการกำหนดเส้นทางลิงก์รวดเร็วและมีความน่าเชื่อถือมากกว่า
- ระยะทางเวกเตอร์ไม่มีโครงสร้างแบบลำดับชั้นในขณะที่อยู่ในสถานะการเชื่อมโยงโหนดสามารถมีโครงสร้างแบบลำดับชั้นได้
ข้อสรุป
ในระยะทางเวกเตอร์การกำหนดเส้นทางการแชร์เส้นทางข้อมูลของระบบ autonomous ทั้งหมดและข้อมูลถูกแชร์กับเพื่อนบ้านเท่านั้น ในทางกลับกันในสถานะการเชื่อมโยงเราเตอร์แบ่งปันความรู้เกี่ยวกับเพื่อนบ้านของพวกเขาเท่านั้นและข้อมูลจะถูกแชร์กับเราเตอร์ทั้งหมด